Gallery
This page shows some cases of path planning using MPEL
 |
PRM, dijkstra's search, potential field interpolator |
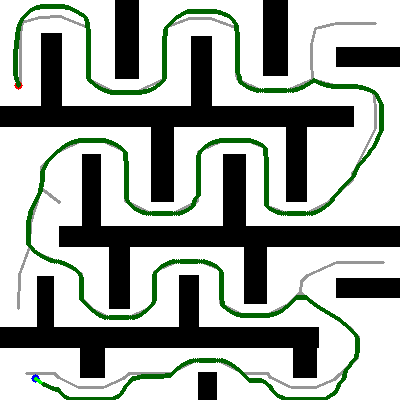 |
Voronoi graph, A* search, potential field interpolator |
This page shows some cases of path planning using MPEL
|
PRM, dijkstra's search, potential field interpolator |
|
Voronoi graph, A* search, potential field interpolator |
From here you can search these documents. Enter your search terms below.